کنترل میدان گرا ( Field-oriented control )
کنترل میدان گرا زیر مجموعه کنترل برداری، تکنیکی برای کنترل فرکانس متغیر استاتور در درایو موتور القایی AC سه فاز با استفاده از دو جزء متعامد تشکیل شده است. یکی شار مغناطیسی تولید شده توسط استاتور را تعریف می کند، در حالی که دیگری مربوط به گشتاوری است که توسط سرعت موتور و موقعیت روتور تعیین می شود.
مزایای کنترل میدان گرا
سیستم های کنترل معمولاً به جای استفاده از مدولاسیون عرض پالس از کنترل کننده های انتگرال متناسب استفاده می کنند که در آن اجزای فعلی با مقادیر مرجع مقایسه می شوند. این به موتورهای الکتریکی اجازه می دهد تا در محدوده سرعت کامل کار کنند و گشتاور کامل را در سرعت صفر تولید کنند. یکی دیگر از مزایای کنترل میدان گرا این است که می تواند شتاب و کاهش سرعت موتور را ارائه دهد و کنترل دقیق تری را در موتورهای با کارایی بالا ارائه دهد.
از آنجایی که الگوریتمهای کنترل بردار فضایی برای کنترل میدان گرا کارآمدتر پیادهسازی میشوند و میکروکنترلرهای کمهزینه قدرت پردازش بیشتری دارند، این تکنیک را میتوان برای درایوهای موتور القایی با کارایی پایینتر استفاده کرد. با افزایش عملکرد کنترلکنندهها، انتظار میرود این تکنیک جایگزین الگوریتمهای کنترل اسکالر ولت/هرتز شود.
کنترل میدان گرا مستقیم و غیرمستقیم
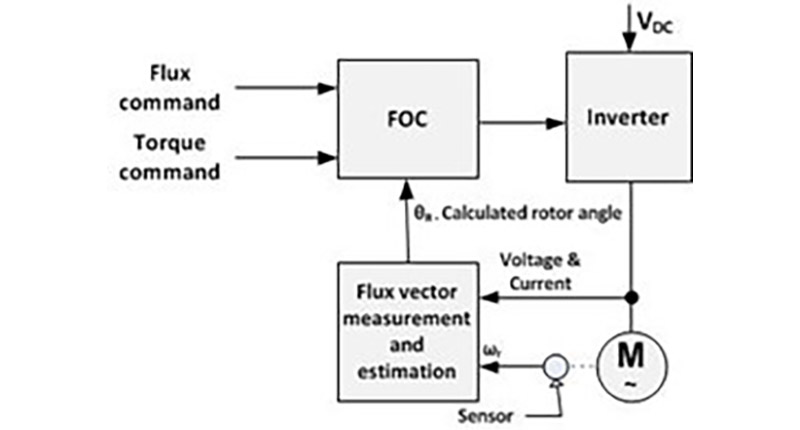
کنترل میدان گرا در دو فرمت مختلف استفاده می شود. یکی به نام روش کنترل بردار مستقیم یا روش بازخورد کنترل میدان گرا که توسط بلاشکه معرفی شد و دیگری که به عنوان روش غیرمستقیم یا پیشخور کنترل میدان گرا معرفی شده توسط هاس شناخته می شود. این دو روش بر اساس اصل تولید بردار کنترلی “تتا” متفاوت هستند.
در کنترل بردار مستقیم این زاویه توسط ولتاژها و جریان های ترمینال به دست می آید، الگوریتمهای معمولی کنترل میدان گرا مستقیم دقت بیشتری را برای کنترل گشتاور نسبت به طرحهای اسکالر ارائه میکنند، اما برای ارائه دادهها برای الگوریتمهای کنترل میدان گرا به حسگرهایی برای کنترل سرعت روتور و شار مغناطیسی نیاز دارند. آنها همچنین با چالش هایی در پاسخ دینامیکی و وابستگی به اندازه گیری پارامترها در موتور روبرو هستند.
در عوض روش کنترل میدان گرا غیرمستقیم زاویه فاز شار میدان مغناطیسی روتور را تخمین می زند و نیاز به سنسورهای اضافی را حذف می کند اما به پیچیدگی و زمان محاسبه سیستم کنترل می افزاید.