سیستم کنترل مستقیم گشتاور ( DTC )
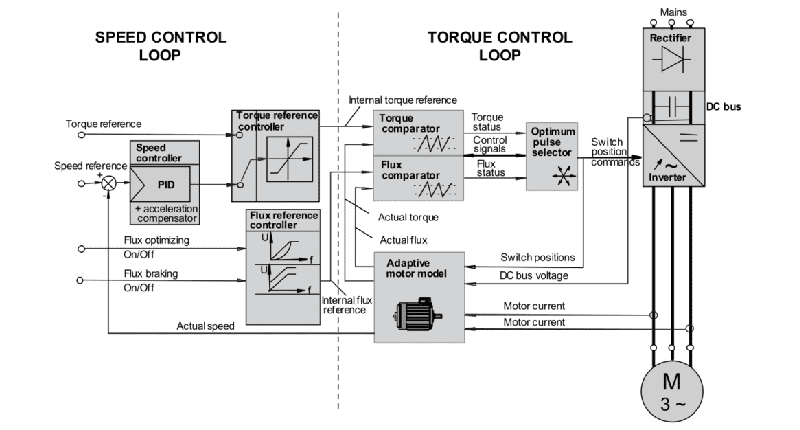
کنترل مستقیم گشتاور از دو حلقه کنترل – یک حلقه کنترل سرعت و یک حلقه کنترل گشتاور – استفاده می کند که همراه با یک مدل موتور پیشرفته برای پیش بینی دقیق شار استاتور و گشتاور موتور کار می کنند.
1 – دو جریان فاز موتور و ولتاژ باس DC به همراه موقعیت سوئیچ اینورتر اندازه گیری می شود. (ولتاژ موتور از ولتاژ باس DC و موقعیت سوئیچ اینورتر تعیین می شود.)
2- جریان و ولتاژ موتور به مدل موتور داده می شود که از الگوریتم های ریاضی پیشرفته برای تولید مقادیر دقیق شار استاتور و گشتاور موتور به همراه سرعت شفت هر 25 میکروثانیه (به سرعت 12.5 میکرو ثانیه در برخی درایوها) استفاده می کند.
3- مقادیر واقعی گشتاور و شار به مقایسه کننده های گشتاور و شار داده می شود که آنها را با مقادیر مرجع گشتاور و شار که توسط حلقه کنترل سرعت ارائه می شود مقایسه می کند.
اهداف مقایسهکنندهها نگهداشتن بزرگی بردارهای گشتاور و شار در یک باند پسماند باریک در اطراف مقادیر مرجع است. این یک عامل اصلی در توانایی DTC برای دستیابی به پاسخ گشتاور سریع بدون افزایش بیش از حد است.
4 – سیگنال های وضعیت گشتاور و شار به انتخابگر پالس بهینه داده می شود.
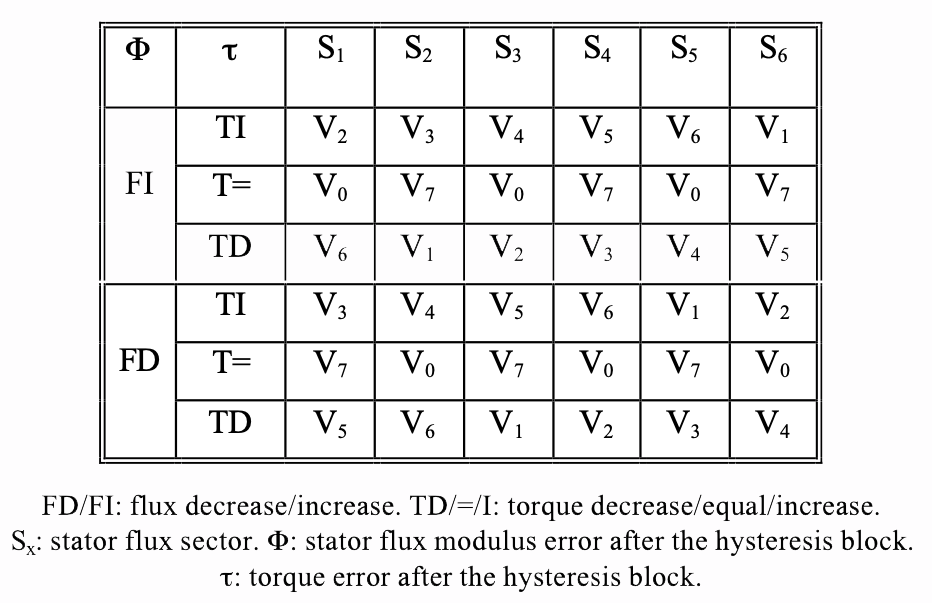
5- انتخابگر پالس بهینه، بردار ولتاژ بهینه را از جدول جستجو انتخاب می کند و بر این اساس، پالس هایی را به دستگاه های سوئیچ نیمه هادی اینورتر ارسال می کند تا گشتاور موتور را در صورت نیاز حفظ یا تغییر دهد.
جدول جستجو بردار ولتاژ بهینه را بر اساس سه پارامتر ارائه می دهد: اینکه آیا گشتاور و شار استاتور هر کدام باید افزایش یا کاهش داشته باشند (یا برای گشتاور ثابت نگه داشته شوند)، و در کدام بخش (بخش 60 درجه) صفحه برداری فضا شار استاتور ساکن است.
سوئیچینگ نیمه هادی در اینورتر دوباره ولتاژ و جریان موتور را تعیین می کند که گشتاور و شار موتور را تعیین می کند، بنابراین حلقه کنترل را می بندد.
6- حلقه کنترل سرعت شامل یک کنترل کننده سرعت (که از یک کنترل کننده PID و یک جبران کننده شتاب تشکیل شده است)، یک کنترل کننده مرجع گشتاور و یک کنترل کننده مرجع شار.
خروجی کنترل کننده سرعت به کنترل کننده مرجع گشتاور تغذیه می شود که خروجی آن مقدار مرجع داخلی مقایسه کننده گشتاور در حلقه کنترل گشتاور است.
کنترل کننده مرجع شار یک مقدار شار مطلق استاتور را تعیین می کند و آن را به عنوان مرجع داخلی مقایسه کننده شار در حلقه کنترل گشتاور ارائه می دهد. کنترل کننده مرجع شار همچنین جایی است که شار کنترل و اصلاح می شود تا عملکردهای اینورتر مانند بهینه سازی انرژی و ترمز شار را فعال کند.
هنگامی که کنترل گشتاور مستقیم با کنترل میدان گرا مقایسه می شود، که همچنین امکان کنترل دقیق سرعت و گشتاور موتور را فراهم می کند، دو تفاوت اصلی برجسته می شود. اولاً، کنترل مستقیم گشتاور بدون حسگر است – هیچ رمزگذار سرعت یا موقعیت مورد نیاز نیست. فقط به اندازه گیری ولتاژ و جریان نیاز دارد. این باعث کاهش هزینه و بهبود قابلیت اطمینان می شود.
تفاوت دوم این است که کنترل مستقیم گشتاور به مدولاتور (مدولاتور عرض پالس یا PWM) نیاز ندارد، بنابراین زمان پردازش با ضریب 10 کاهش می یابد که پاسخ گشتاور را معمولاً به کمتر از 2 میلی ثانیه بهبود می بخشد. این بدان معنی است که گشتاور و سرعت را می توان حتی در سرعت های پایین به طور دقیق کنترل کرد و گشتاور کامل راه اندازی تا سرعت صفر در دسترس است.
References : https://www.motioncontroltips.com